LPP SOFT
Autonomous navigation


LPP SOFT
Autonomní navigace
- Orientace v prostředí na vysoké úrovni, určení polohy UGV a plánování cesty pro spolehlivý provoz.
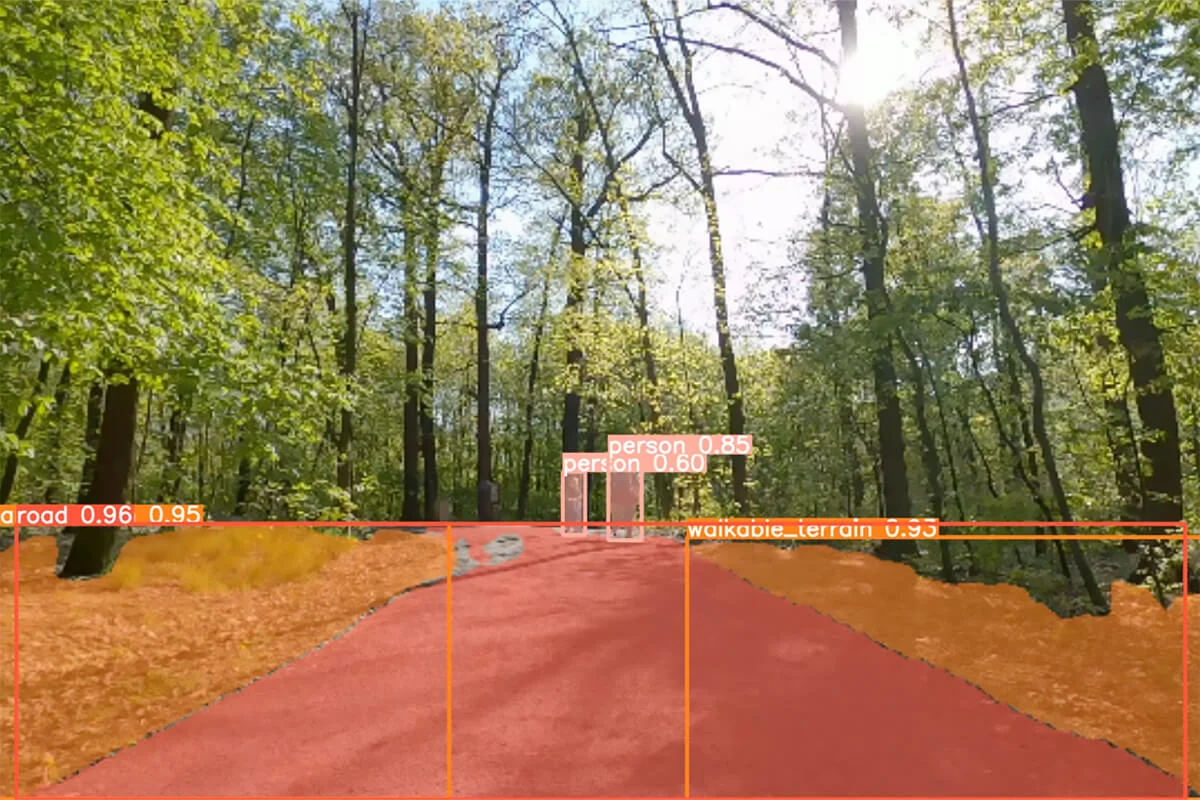
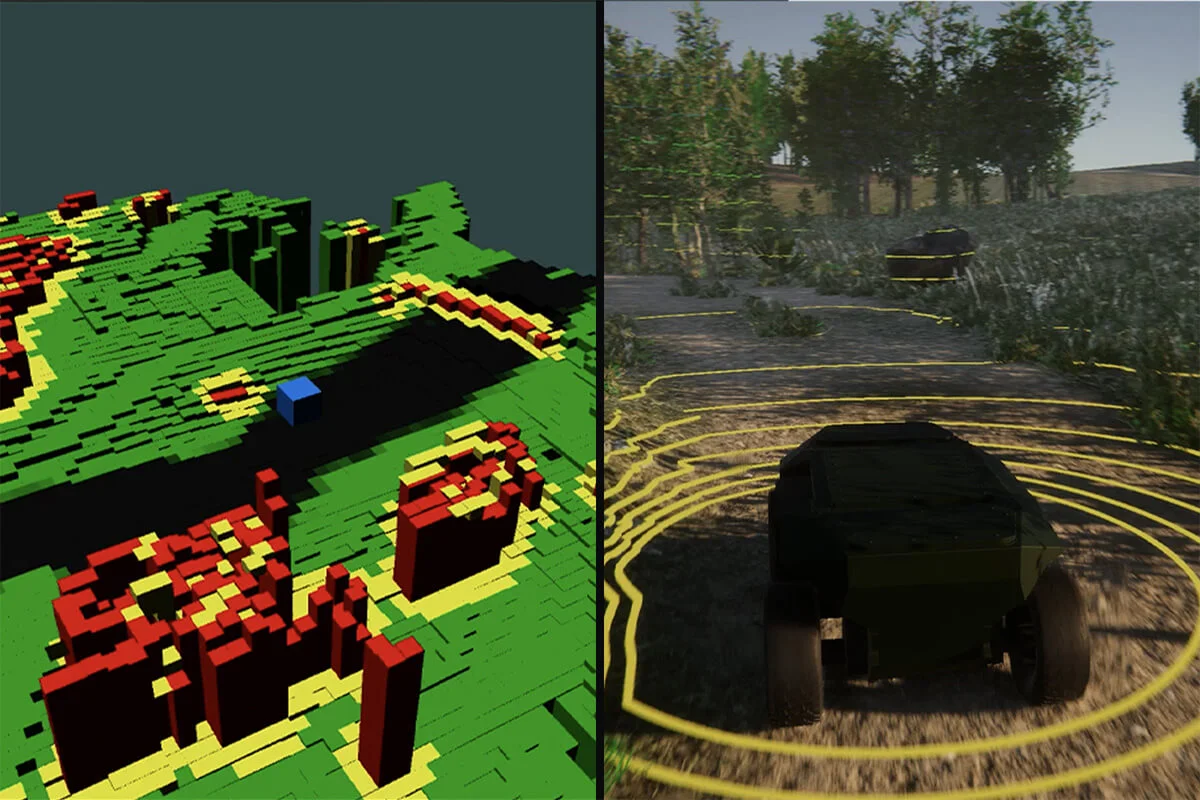
- Rozpoznávání objektů na základě strojového učení pro navigaci UGV v neznámém terénu s vyhodnocováním rizik.
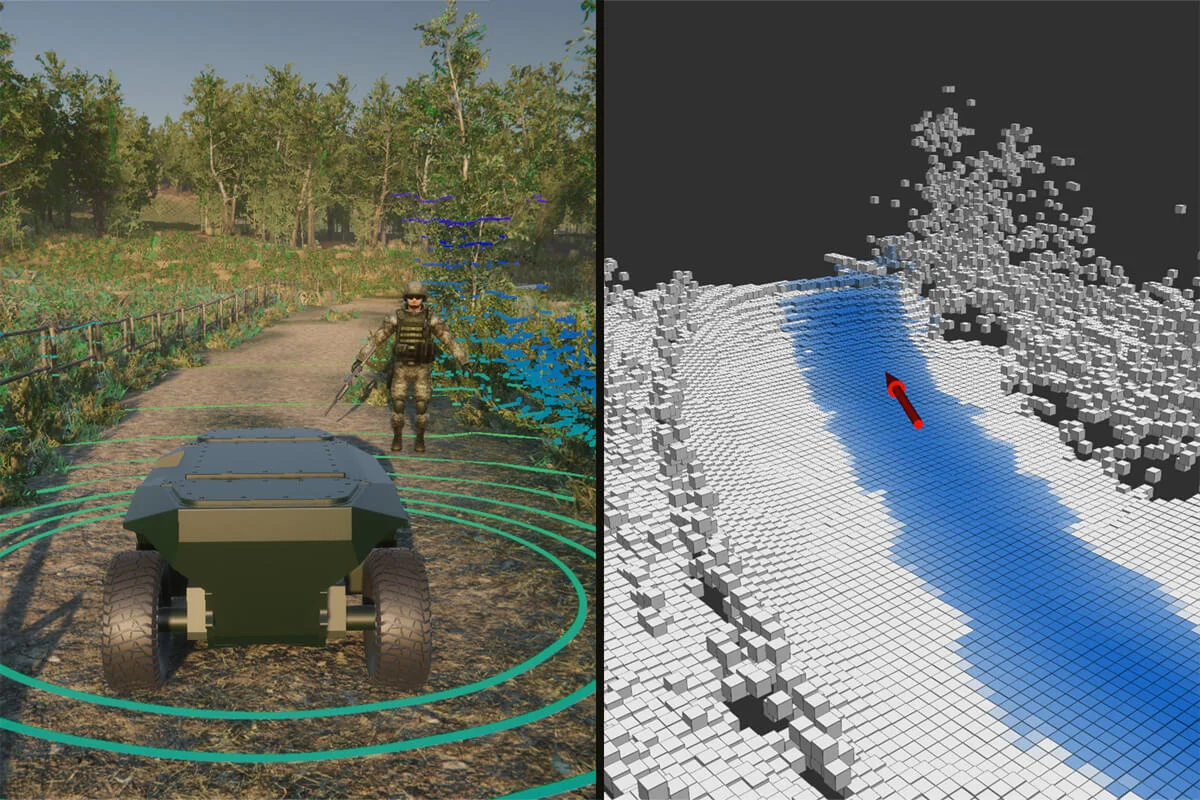
- Simulace virtuálního prostředí se simulovanými senzory GPS-IMU-LiDAR-Kamera pro testování navigace v prostředí digitálního dvojčete.
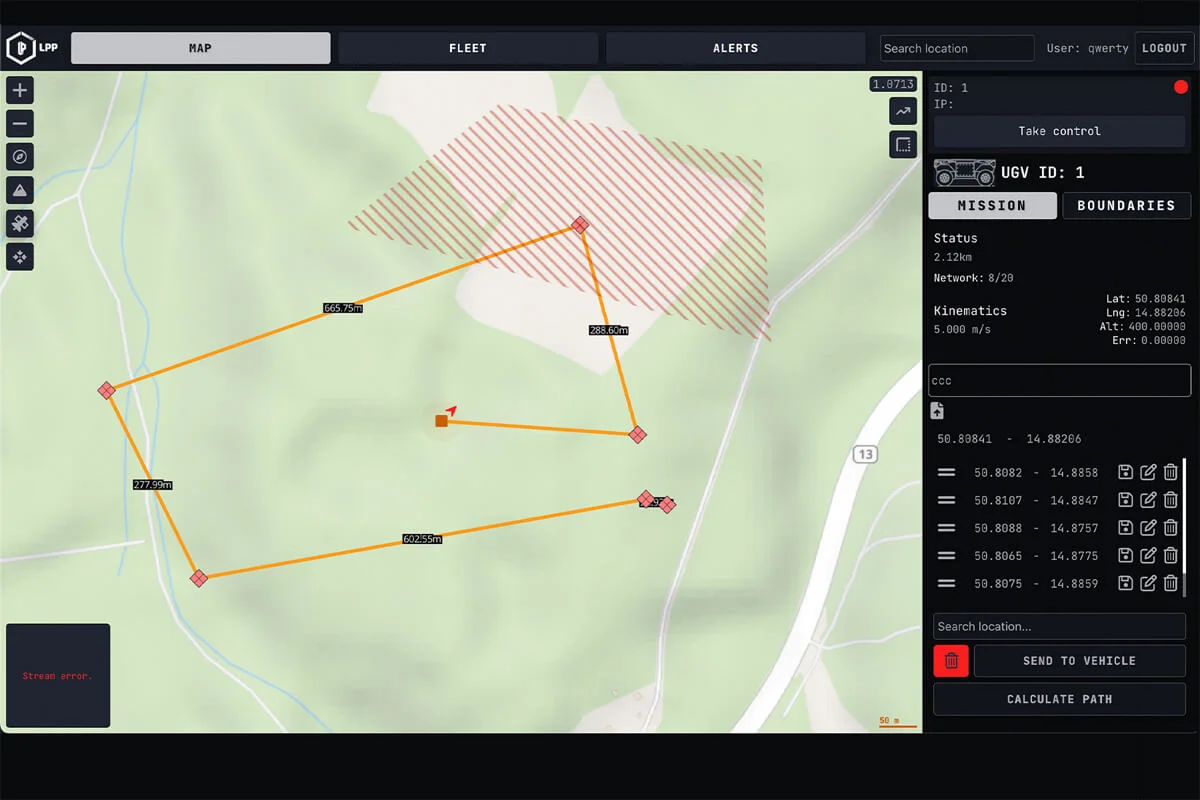
- Aplikace Global Planner pro streamování kamer, diagnostiky vozidla v reálném čase a plánování misí.
- Připraveno k implementaci do jakéhokoli bezpilotního systému a vozidla s příslušnými senzory.
The system uses IMU, GPS, wheel encoders, and a magnetic compass, to determine the UGV‘s position and orientation. All the information gathered is used to create a map of the environment for path planning and obstacle avoidance. The planning and control function generates global and local motion plans based on the map and the UGV‘s current position.
The human-machine interface provides operators with a GUI and handheld controller for semi-autonomous UGV control or full autonomy operation. The HMI also streams camera output, displays real-time vehicle diagnostics, and allows for mission planning.
The autonomous decision-making feature uses AI machine learning algorithms and sensor fusion to dynamically navigate the UGV through unknown terrain and evaluate the best decision while minimizing risks.
The specific sensors used in a UGV depend on the intended function and level of autonomy required. The system can integrate with existing unmanned systems and be used on any vehicle with the appropriate sensors. The software architecture is designed to be compatible with ROS1/ROS2 systems.
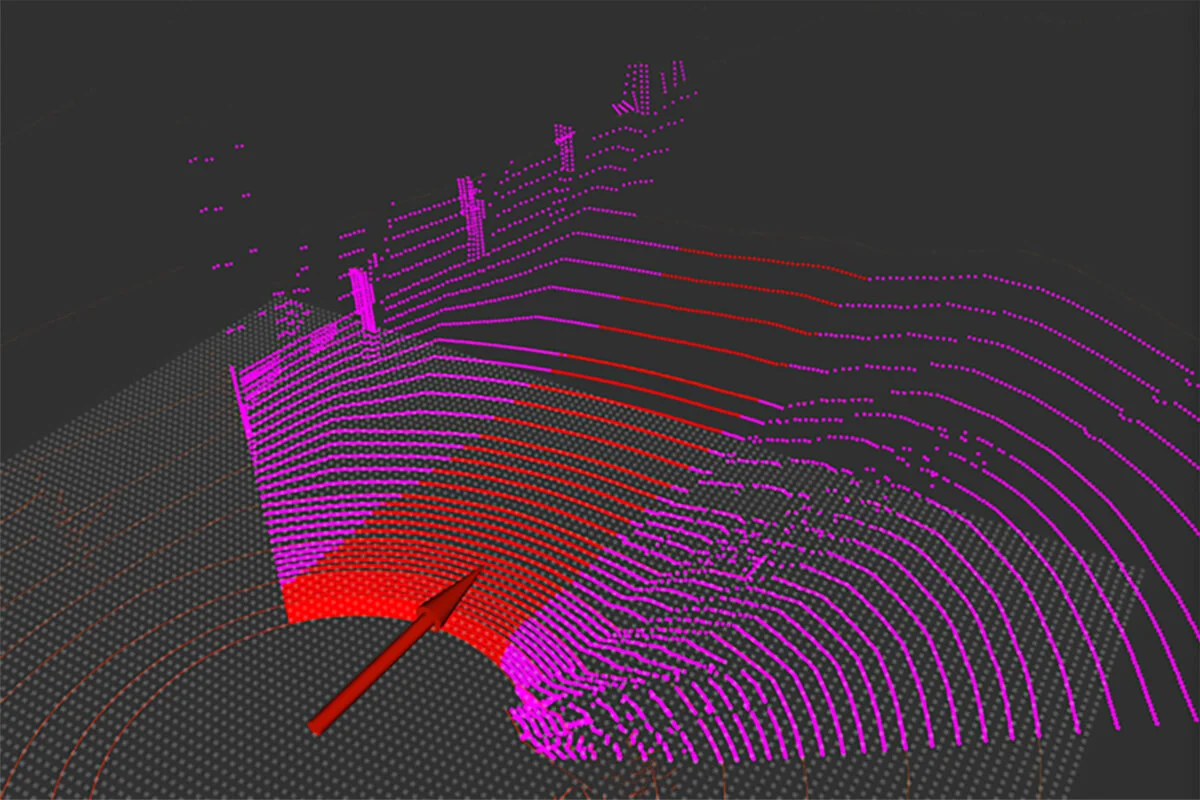
Autonomní navigace bezpilotních vozidel využívá kamery, LiDAR, radar a IMU k zajištění robustní podpory řízení a autonomie vozidla. Efektivně přenáší informace ze senzorů do plánovací a řídicí vrstvy a vylepšuje základní řídicí architekturu o segmentační/lidarový slam pro plynulý provoz. Využitím řízení na základě way-pointů a funkce Anti-collision, systém činí informovaná rozhodnutí, ale také zajišťuje úspěšný průjezd různorodými oblastmi.
Autonomní navigace využívá simultánní lokalizaci a mapování (SLAM) k integraci oddělených datových sad do jednotného obrazu a využívá je k tréninkovému procesu. Na základě analýzy terénu, detekce překážek a plánované trajektorie nastavuje možnosti průjezdu a do prostředí pro vývoj topologie manévrového grafu začleňuje vyhýbání se překážkám pro scénáře mimo silnici. Výstupy tréninkového procesu jsou integrovány do nasazených modelů na bezpilotních vozidlech. Integrace vrstvy map do procesu plánování a odhadu trajektorie dále zvyšuje jeho efektivitu.
Autonomní navigace využívá techniky segmentace, analyzuje datové objekty prostřednictvím interních vycvičených modulů pro detekci překážek a stanovuje trajektorii a omezující podmínky. V případě neprůchodnosti, jako jsou překážky, nedostatečné mapové podklady, chybějící informace GPS nebo nefunkční lidar, systém umožňuje opětovné plánování trajektorie pro nepřerušenou navigaci.
Aplikace poskytuje operátorům grafické uživatelské rozhraní a ruční ovladač pro poloautonomní řízení nebo plně autonomní provoz. Aplikace také streamuje výstup z kamery, zobrazuje diagnostiku vozidla v reálném čase a umožňuje plánování misí.
Systém lze integrovat se stávajícími bezpilotními systémy a používat jej na jakémkoli vozidle s příslušnými senzory. Softwarová architektura je navržena tak, aby byla optimalizována pro provoz v offline režimu.
Detailní informace
| Percepce | Využívá senzory, jako jsou kamery, LiDAR a radar, k identifikaci a sledování překážek v cestě. |
| Navigace | Využívá GPS, IMU a snímače kol k určení své polohy, naplánování a provedení trasy do daného cíle. |
| Vyhýbání se překážkám | Detekuje překážky pomocí senzorů, jako je LIDAR, radar, a upravuje svou trajektorii nebo rychlost tak, aby se jim vyhnulo. |
| Mapování | Vytváří 3D mapu svého okolí za účelem plánování trasy a vyhýbání se překážkám. |
| Plánování cest | Plánuje optimální trasu s ohledem na terén a překážky a upravuje ji v reálném čase na základě změn v prostředí. |
| Rozhodování | Zajišťuje autonomní rozhodování v reálném čase na základě shromážděných informací a zadaných úkolů. |
| Řízení | Řídí pohyb pomocí aktuátorů, jako jsou motory nebo hydraulika. |
| Komunikace | Navrženo tak, aby bylo fungovalo primárně offline. Komunikuje také s řídicím centrem prostřednictvím bezdrátových protokolů, jako je síť MESH, Wi-Fi nebo mobilní sítě. |
Průzkum
Systém UGV vybavený kamerami s vysokým rozlišením, senzory LIDAR pro 3D mapování a infračervenými senzory pro noční vidění poskytuje informace o prostředí v reálném čase.
Pozorování
Systém UGV pro sledování specifických oblastí, jako jsou hranice, vojenská zařízení nebo veřejná prostranství, může detekovat a identifikovat potenciální hrozby pomocí kamer s dlouhým dosahem a rozšířeným zoomem, termovizí pro detekci tepelných stop a akustických senzorů pro detekci zvuku.
Odminování
Systém UGV pro odminování nebezpečných oblastí může využívat detektory kovů, radar pronikající do země, robotická ramena se specializovanými nástroji a dálkový detonační systém k odminování minových polí nebo k práci v nebezpečných oblastech.
Logistika
Systém UGV pro přepravu zásob, vybavení nebo personálu na krátké vzdálenosti může pracovat autonomně nebo pod dálkovým ovládáním s nosností až 500 kg, s robustním podvozkem pro použití v terénu a navigací GPS.